封面 ID:78296283
使用教材《人工智能原理与应用》第二版,张仰森
PDF下载,仅供参考
绪论
定义:具有智能行为的计算机系统
人工智能诞生的标志发展阶段:1956年的达特茅斯会议,McCarthy 总结人工智能
主要研究方法:
- 自上而下,符号主义(逻辑演绎)
- 自下而上,连接主义(模拟神经元)
- 行为主义(人工智能会自己进化,无需知识和推理)
主要研究领域:(知道五六个)
- 专家系统
- 自然语言处理
- 机器学习
- 自动定理证明
- 自动程序设计
- 分布式人工智能
- 机器人
- 模式识别
- 博弈
- 计算机视觉
- 人工神经网络
知识表示
知识特性:相对正确性(范围有效)、不确定性(模糊性)、可表示性(可数据化存储处理)、可利用性
逻辑表示
表示知识步骤:
- 定义谓词,确定谓词语义
- 对每个谓词中的变元赋以待定的值
- 通过谓词的连接表示规则
例子:机器人在c处;a、b处各有一个桌子且a处桌子上有箱子,现在要机器人到a把箱子搬到b再回原点
TABLE(x):x是桌子。 ON(w,x):w在x的上面。
EMPTY(y):y手中是空的。 AT(y,z):y在z处。
HOLDS(y,w):y拿着w。 GOTO(x,y):从x走到y。
PICK_UP(x):在x处拾起积木。SET_DOWN(x):在x处放下积木。
初始状态描述:
AT(robot,c),EMPTY(robot),TABLE(a),TABLE(b),ON(box,a)
目标状态描述:
AT(robot,c),EMPTY(robot),TABLE(a),TABLE(b),ON(box,b)
规则:
GOTO(x,y)
条件:AT(robot,x)
动作:删除 AT(robot,x),增加 AT(robot,y)
PICK_UP(x)
条件:AT(robot,x)∧EMPTY(robot)∧TABLE(x)∧ON(box,x)
动作:删除 EMPTY(robot) ON(box,x),增加 HOLDS(robot,box)
SET_DOWN(x)
条件:AT(robot,x)∧HOLDS(robot,box)∧TABLE(x)
动作:删除 HOLDS(robot,box),增加 EMPTY(robot) ON(box,x)优缺点
- + 类自然语言、易实现、精确性、推理严密模块化
- - 不能表示不确定知识、组合爆炸问题、过程复杂效率低
产生式系统
产生式系统由数据库(初始条件,中间结果)、规则库(if x then y)、推理机(规则选择)构成。可用于确定性/不确定性表示
表示方法
- 确定性规则知识
if p then q - 非确定性规则知识
if p then q (可信度) - 确定性事实性知识
(对象,属性,值)/(关系,对象1,对象2) - 确定性事实性知识
(对象,属性,值,可信度)/(关系,对象1,对象2,可信度)
推理方式
- 正向推理,适合初始状态数小于目标数
- 反向推理,适合初始状态数大于等于目标状态数
- 双向推理
产生式特点:清晰性(规则形式固定且独立)、模块性(知识库和推理机分离)、自然性(符合人的思维)
语义网络
语义网络是一个有向图,节点表示实体,弧表示节点之间的关系(动作/属性)
常用语义关系
- 类属关系:具有共同属性的不同事物,如 AKO、AMO、ISA
- 包含关系:部分与整体,Part-of
- 占有关系:事物或属性间的“具有”关系,Have
- 时间关系:事件发生时间先后,before、after、during
推理过程
- 匹配推理:根据问题构造局部网络,求解部分留空;从知识库中寻找相近的网络;留空处匹配的结果就是解
- 继承推理:值继承(直接继承上层节点的属性)、过程继承(继承属性的计算方法)
语义网络特点:结构性、自然性、联想性(事物联系)、非严格性(表示形式不唯一)
框架结构
框架名:每个框架都要拥有框架名。
槽:用于描述对象的某一方面的属性,并且可以设置约束条件。
侧面:用于描述相应属性的一个方面。
有些属性是事先确定的(类属特性),有些属性值需要在生成实例的时候代入。
框架的匹配就是实体代入框架的过程。其推理方法遵循匹配和继承原则,主要有匹配推理和演绎推理
匹配推理:将问题框架表示,求解部分留空;与知识库中的框架匹配选出候选框架;对候选框架评价选出结果,留空处匹配的结果为解
框架特点:结构性、继承性、自然性
谓词演算与消解原理
置换&合一
置换是形如${t_1/x_1\cdots t_n/x_n}$的有限集,前者只含常量,后者只含变量,表示用前者替换后者
有$\theta={a_1/x_1\cdots a_n/x_n},\lambda={b_1/y_1\cdots b_n/y_n}$,则 θλ 如下求得
$$tmp={a_1\cdot\lambda/x_1\cdots a_n\cdot\lambda/x_n}\cup\lambda$$
先从 λ 中删除 $y_i\in{x_1\cdots x_n}$ 的项,再删除 $a_i\cdot\lambda=x_i$ 的项,剩下的 tmp 就是 θλ
有公式集${E_1\cdots E_n}$,若存在置换 θ 使得$E_1\lambda=\cdots=E_n\lambda$,则该公式集可合一,θ 为合一置换
最一般合一置换(mgu)不唯一,若存在公式 E1 和 E2,他们的 mgu 求法如下
- 令 $W={E_1,E_2}$
- 令 $k=0,W_k=W,\sigma_k=\epsilon$,$\epsilon$ 指空置换
- 如果 $W_k$ 只剩一个,停止算法,$\sigma_k$ 为所求
- 求 $W_k$ 的不一致集 $D_k={a_k,x_k}$
- $\sigma_{k+1}=\sigma_k\cdot {a_k/x_k},W_{k+1}=W_k{a_k/x_k},k=k+1$,然后转第三步
消解反驳
skolem范式是消去存在量词的前束范式(合取),消除存在量词规则:
- 存在量词不在全称量词辖域:直接用某个常量代替
- 存在量词在若干个全称量词的辖域:用$f(x_i\cdots)$代替存在量词约束的变量,$x_i$为受到的全称约束变量
原子公式/原子:不含连接词的谓词公式
文字:原子及原子的否定;
子句:文字的析取式
通过 skolem 化获取,其合取项的集合就是一子句集
归结公式(关键找到互补文字):
$$\lambda\lor C_1,\neg\lambda\lor C_2 \rightarrow C_1\lor C_2$$
消解反驳:若要从子句集 S 中推出 λ,等价于从 $S\cup{\neg\lambda}$ 中推出恒假 NIL。互补文字中允许常量置换变量
消解反驳问题求解:将待求解问题用谓词公式表示,将其否定并与Answer谓词构成析取式加入到原子句集中消解
消解原理改进:
- 广度优先:每个子句要跟其他子句消解。可以保证找到最短消解路径但是有组合爆炸的问题
- 支集策略:略
- 单位优先:优先使用单位子句
非确定性推导
证据:已知事实;知识:规则
不确定性方法分类:模型方法(不确定的证据和不确定的知识算出结论的不确定性)、控制方法
可信度方法
知识以产生式规则的形式表示,知识不确定性以可信度 CF(H,E) 表示,通常由专家给出
$$if\quad E\quad then\quad H, \quad CF(H,E)$$
其中 E 可以是复合条件,H 可以多个结论
证据不确定性以 CF(E) 表示,初始给出或推导算出。当证据是多个证据的合取时,其 CF 取当中的最小;析取时取最大
$$
\begin{aligned}
E&=E_1\wedge\cdots\wedge E_n\
CF(E)&=min{CF(E_1)\cdots CF(E_n)}
\end{aligned}
$$
推理计算:
- 单条知识支持结论:$CF(H)=CF(H,E)*max{0,CF(E)}$
- 多条知识支持同一结论(假设两条):
- 先用上面的方法分别计算每一条知识的结论可信度得到 $CF_1(H),CF_2(H)$
- 然后使用以下公式进行合成
$$CF_{1,2}(H)=
\begin{cases}
CF_1(H)+CF_2(H)-CF_1(H)CF_2(H)\quad &if\ CF_1(H)\ge 0,CF_2(H)\ge 0\
CF_1(H)+CF_2(H)+CF_1(H)CF_2(H)\quad &if\ CF_1(H)<0,CF_2(H)<0\
{CF_1(H)+CF_2(H)\over 1-min(|CF_1(H)|,|CF_2(H)|)}\quad &if\ CF_1(H)*CF_2(H)<0
\end{cases}
$$
已知道结论原始可信度 CF(E) 的情况下更新 得到 CF(H/E):
当 CF(E)>0
$$CF(H/E)=
\begin{cases}
CF(H)+CF(H,E)CF(E)-CF(H)CF(H,E)CF(E)\quad &if\ CF(H)\le 0,CF(H,E)\le 0\
CF(H)+CF(H,E)CF(E)+CF(H)CF(H,E)CF(E)\quad &if\ CF(H)<0,CF(H,E)<0\
{CF(H,E)CF(E)+CF(H)\over 1-min(|CF(H)|,|CF(H,E)CF(E)|)}\quad &if\ CF(H)*CF(H,E)<0
\end{cases}
$$
当 CF(E)=0 不用更新
主观Bayes
推理网络是一个有向图,节点表示假设结论,边表示规则并且有一数值对 (LS,LN),分别代表规则成立的充分性和必要性。
知识不确定性由 (LS,LN) 描述,表现为
$$if\quad E\quad then\ (LS,LN)\ H\ [P(H)]$$
证据不确定性由概率 P(E/S) 描述(但计算用C(E/S)),当证据是多个证据的合取时,其 P 取当中的最小;析取时取最大
$$
\begin{aligned}
E&=E_1\wedge\cdots\wedge E_n\
P(E/S)&=min{P(E_1/S)\cdots P(E_2/S)}
\end{aligned}
$$
推理计算
Ⅰ确定性证据:
- 证据肯定出现 P(E)=P(E/S)=1 时:$P(H/E)={LSP(H)\over (LS-1)P(H)+1}$ (LS=1不用算)
- 证据肯定不出现 P(E)=P(E/S)=0 时:$P(H/\sim E)={LNP(H)\over (LN-1)P(H)+1}$ (LN=1不用算)
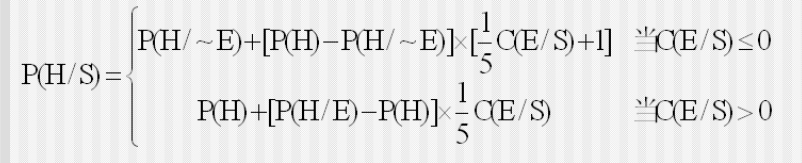
Ⅱ非确定性证据:
EH 公式,中间证据计算后验概率 P(H/S),后用

CP 公式,初始证据计算后验概率 P(H/S),先用
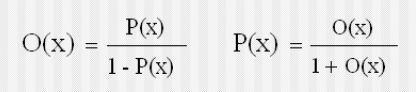
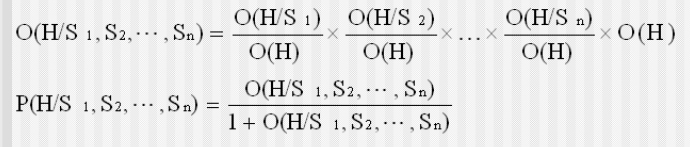
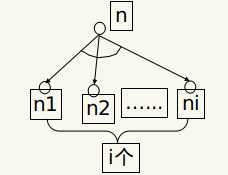
若 n 条知识支持同一结论,每条证据 Ei 都有相应的 Si 对应,需要进行合成:首先对每条知识分别求出 $O(H/S_i)$(可 $P(H/S_i)$ 求出),然后使用下面公式求出$O(H/S_i,\cdots,S_n)$,进一步求出 $P(H/S_i,\cdots,S_n)$
已知先验更新出后验证概率的方法参照可信度的公式
D-S证据理论
所有可能的结论的集合为 D,构成 2^n^ 个子集(设任意一子集为 A),2^D^ 表示这些子集的集。命题的结论 y 都会落到某个子集 A 之上,于是用集合 A 表示该命题
概率分配函数 M(x),满足
$$\sum_{A\subseteq D}M(A)=1,M(\phi)=0$$
信任函数 Bel(x)(下限函数),度量命题 A 为真的信任程度,满足
$$Bel(A)=\sum_{B\subseteq A}M(B)$$
似然函数 Pl(x) (上限函数),度量命题 A 为非假的信任程度,满足
$$Pl(A)=1-Bel(~A)=\sum_{B\cap A\ne\phi}M(B),\quad A\in 2^D$$
概率分配函数正交和,用于合并多个概率分配函数,$M=M_1\oplus M_2$ 的计算如下
$$
\begin{aligned}
&M(\phi)=0\
&M(A)=K^{-1}\times\sum_{x\cap y=A}M_1(x)\times M_2(y)\
&K=\sum_{x\cap y\ne\phi}M_1(x)\times M_2(y)
\end{aligned}
$$
若 K=0,不存在正交,两函数矛盾
基于特定概率分配函数的推理模型
$$f(A)=Bel(A)+{|A|\over|D|}\times[Pl(A)-Bel(A)]$$
知识不确定性以产生式规则的形式表示;H 是结论,是样本空间的子集;ci 对应 hi 的可信度
$$if\quad E\quad then\quad H={h_1,\cdots,h_n}\quad CF={c_1,\cdots,c_n}$$
证据不确定性由 f(E) 表示,当证据是多个证据的合取时,其 f 取当中的最小;析取时取最大
$$
\begin{aligned}
E&=E_1\wedge\cdots\wedge E_n\
f(E)&=min{f(E_1)\cdots f(E_2)}
\end{aligned}
$$
推理计算步骤:
Ⅰ 根据所给知识计算结论 H 的概率分配函数

Ⅱ 如果有多条知识支持同一结论,需要正交合成他们的概率分配函数
Ⅲ 求 H 的信任函数 Bel(H) 和似然函数 Pl(H)
Ⅳ 使用推理模型公式计算 f(H)
搜索策略
无信息搜索:盲目搜索,根据事先固定排序调用规则;启发式搜索:跟据可用信息动态确定规则排序
A 算法&A*算法
扩展节点时对 open 表节点按照某个标准进行排序,选取最有“希望”的节点进行扩展
估价函数 $f(n)=g(n)+h(n)$,g(n) 为代价函数,可以通过当前搜索路径算出来(通常指路径长度);h(n) 为启发函数,某种评价,决定的启发信息的强度。通常估价越低越优先扩展,这就是 A 算法
在 A 算法中,引入$f^(n)=g^(n)+h^(n)$,带星号对应最短路径(隐含)的代价,不带星号的是对带星号的近似。如果满足 $h(n)\le h^(n)$,则该 A 算法变为 A* 算法
A* 算法性质:
- 可采纳性:如果有解,一定能找到最优解
- 单调性:若对所有节点 ni 和 nj ,其中 nj 是 ni 的子节点,满足 $h(n_i)-h(n_j)\le c(n_i,n_j),h(s)=0$(构成三角形),则 h(n) 是单调的,此时 A* 算法扩展的节点序列其估价 f 的值是非递减的
- 信息性:启发信息大的和启发信息小的,前者 h 恒大于后者,后者扩展节点数必不少于前者
与或图搜索
消耗值计算:
- K-链接符的消耗值为 k
- 解图消耗值记为 k(n,N),若 n 是目标节点之一,k(n,N)=0;否则 $k(n,N)=Cn+k(n_1,N)+\cdots+k(n_i,N)$,其中 Cn 为连接符的消耗值
- 优先选择消耗值小的,在扩展过程中更新消耗值
博弈算法
极大极小搜索,max 代表我方,min 代表对手;对节点进行估值之后 min 层向 max 层返回最大值,max 层向 min 层返回最小值
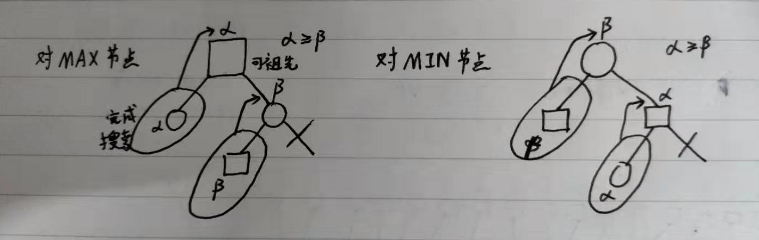
α-β剪枝:
- 若一个MIN层节点的β值小于或等于它任一先辈MAX层节点的α值,可终止以下该极小值层中这个MIN节点以下的搜索
- 若一个MAX层节点的α值大于或等于它任一先辈MIN层节点的β值,可终止以下该极大值层中这个MAX节点以下的搜索
机器学习
学习策略
- 机器学习:死记,直接根据输入检索出输出
- 示教学习:执行过程中接受外部建议
- 类比学习:属性特征提取
- 示例学习:从正反例中归纳出概念的一般描述
描述空间算法
- 初始化 H 为整个概念空间,G 集合只包含零描述,S 集合包含所有特例
- 接受训练例(重复直到 G=S)
- 如果是正例:从 G 中去除不符合该正例的概念,然后尽可能小地一般化 S 以覆盖该正例
- 如果是反例:从 S 中去除覆盖该反例的概念,然后尽可能小地特殊化 G 以不覆盖该反例
- 最后的 G/S 就是所学概念

Comments | ?? 条评论